Specification
素体として使用したキットについて
 M1endoskull kit
M1endoskull kit
 M1endoskull kit
M1endoskull kit
 M1endoskull kit
M1endoskull kit
ターミネーター2の公開から3年が経過した頃、 M1号社から発売されたのが今回のソフトビニール製キットである。
造形・改修作業
 terminator eye
terminator eye
 terminator silinder
terminator silinder
 terminator cervical spine
terminator cervical spine



1作目の「THE TERMITOR」で使用されたエンドスカルの資料を参考に、下記のような処理を行った。
- 眼球内のレンズ部品を透明レジンにて新規造形
- 後頭部より伸びるアクチュエーター部品を真鍮削り出しで新規製作
- 頸椎部品(キット付属の頸椎部品を基とした新規造形部品)の前面に、「溝」を彫刻
 Eye sensor light emission
Eye sensor light emission
 artificial tooth
artificial tooth
 Oil line Hydraulic hoses
Oil line Hydraulic hoses
 Oil line Hydraulic hoses
Oil line Hydraulic hoses
また、下記のようにディテールに手を加えた。
- T2版エンドスケルトンのプロップからの複製品を基に頸椎部品を新規造形
- 側頭部周辺部に4カ所の「溝」を彫刻
- ソフトビニール製の歯を除去し、アクリル製義歯に換装
- 側頭部下から伸びるオイルラインに汎用ブレーキホースを使用し、その付け根のバルブ部品を新規造形
ペイント
 six-layer chrome plating
six-layer chrome plating
 six-layer chrome plating
six-layer chrome plating
非金属素材に対して処理が容易な「真空蒸着メッキ」では、質感・色味・耐久性の点でマイナス要素が多いと判断し、「純銀メッキ処理」を採用。この「純銀メッキ」は、蒸着メッキに比べてコストと手間がかかり、何より「高度な技術」が必要とされる。そこで、日本国内でも有数のメッキ処理工房に依頼した。
塗装に関しては、1作目終盤の「炎の中から立ち上がるエンドスケルトン」をモチーフにしたことから、「焼け焦げ」と「戦闘によるダメージ」を意識したペイントをエアブラシを用いて施した。ただし、過度な汚し表現にならぬよう細心の注意を払い、「奇麗に汚す」ことを念頭に置いた塗装を行った。
アニマトロニクス
このオブジェの最大の特徴である「頭部の可動ギミック」であるが、その「動き方」にはかなり神経を使った。
この点に関しては下記のようなテーマを設けて、ロボット機構部品の設計を行った。
- ぎこちない動きにならぬこと
- スムースに動きすぎないこと
この二律背反のテーマを念頭に置いたのにはいくつかの理由がある。
まず、「等身大のオブジェを機械仕掛けで動かす」ということは、小さなスケールモデルを動かすのとは違い「ごまかし」が効かず、少しでも違和感のある動きになってしまえば全くの興ざめであり、このオブジェの本質に関わる重大な失敗になりうると考えた。
また逆に、あまりにも人間的なスムースな動きを目指してしまうと、「お世辞にも完璧とは言い難い1作目製作当時のアニマトロニック技術」を凌駕してしまい、1作目の終盤、あの「工場内で無機質にカイルとサラを追跡する冷徹で恐ろしい雰囲気」を表現できないと考えたからである。「スムース過ぎず、違和感なく」という目標を掲げ、使用するモーターやベアリングの部材を選定し、機構の設計を行った。
このウェブサイト内で紹介している動画から、私のこだわりを感じ取ってもらえたらこれ以上ない幸せである。
コントロールスイッチ
TYPE-1 (Animatronic Bust ver.2.1)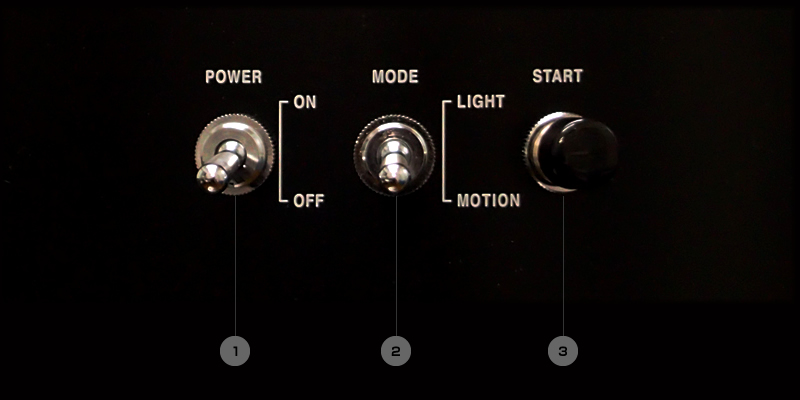
Control switchs
Control switchs
| 電源スイッチ | ONにすると無条件でホームポジション復帰動作を開始 | |||
|---|---|---|---|---|
| 眼球発光モード /シーケンス動作切り替えスイッチ | LIGHT側で眼球が点灯する(3のスイッチ操作は無効)。MOTION側に切り替えることで眼球が消灯。 | |||
| 動作開始スイッチ |
| |||
| パイロットランプ | 左側 | 右側 | 状態 | |
| 電源供給状態(電源プラグが刺さっていて電源スイッチはOFFの状態) | ||||
| 電源スイッチON状態(各サーボモータにブレーキがかかった状態) | ||||
| ホームポジション復帰動作中である事を示す(この間各スイッチ操作は無効) | ||||
| シーケンス実行中 | ||||
| CPUにエラーが生じたことを示す。電源をOFFにし、プラグを一旦抜いてから再起動することで復帰する | ||||
TYPE-2 (Animatronic Bust ver.2.2/2.3)
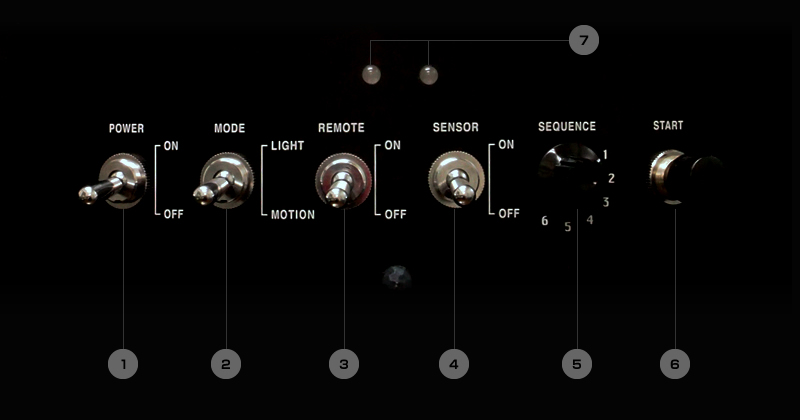
| 電源スイッチ | ONにすると無条件でホームポジション復帰動作を開始 | ||
|---|---|---|---|
| 眼球発光モード /シーケンス動作切り替えスイッチ | LIGHT側で眼球が点灯する(3のスイッチ操作は無効)。MOTION側に切り替えることで眼球が消灯。 | ||
| 動作開始スイッチ | ON側でリモコン操作が可能(スイッチ6の操作は無効)。 | ||
| センサーモード選択スイッチ | センサー感知モードに入り20秒後からセンサー待機状態となる。センサーが動きを感知すると5秒後より専用のシーケンス(約25秒)を開始し、終了後に再び待機状態となる。 眼球は常に発光している。 | ||
| シーケンス選択ダイヤル | スイッチ6により再生するパターンを以下から選択できる。
| ||
| 動作開始スイッチ |
| ||
| パイロットランプ | 左側 | 右側 | 状態 |
| 電源供給状態(電源プラグが刺さっていて電源スイッチはOFFの状態) | |||
| 電源スイッチON状態(各サーボモータにブレーキがかかった状態) | |||
 | ホームポジション復帰動作中である事を示す(この間各スイッチ操作は無効) | ||
| シーケンス実行中 | |||
| CPUにエラーが生じたことを示す。電源をOFFにし、プラグを一旦抜いてから再起動することで復帰する | |||
 | リモコンモード待機状態 | ||
 | リモコン電波受信 | ||
| センサーモードが準備中であることを示す(約20秒間はセンサー感知せず) | |||
| センサーモード待機状態(センサーが監視を開始) | |||
リモコンの説明
 Remote Control Diagram
Remote Control Diagram
 Remote Control Diagram
Remote Control Diagram

| シーケンス指定ボタン | 1回押すと「シーケンスA×1回再生」を選択。2回押すと「シーケンスA×3回連続再生」を選択。 |
|---|---|
| シーケンス指定ボタン | 1回押すと「シーケンスB×1回再生」を選択。2回押すと「シーケンスB×3回連続再生」を選択。 |
| 一時停止/再開ボタン | シーケンス動作途中で押すと一時停止、もう一度押すと再開。 |
| 再生/停止ボタン | 1または2で選択した動作を開始。動作中に2回押すと強制終了(ホームポジション復帰動作を行う)。 |
※3のボタンについては、リモコンモードに選択されていない場合でも操作が可能。センサーモードで動作中も操作可能。